MPU-60 50500 को साथ प्रदर्शन प्रदर्शन: सेटअप, क्यालिब्रेसन, र अनुप्रयोगहरू
2024-04-25
9241
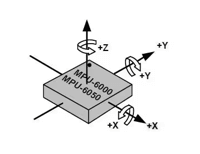
MPU-60 50 500 विश्वको पहिलो एकीकृत - अक्ष मोशन प्रोसेसिंग कम्पोनेन्ट हो, जसले एक - अक्ष जुत्ताको एकीकृत गर्दछ, - अक्ष extressermanometer र एक स्केल डिजिटल गति प्रोसेसर (DPP)।यसको प्रयोगको उद्देश्य वस्तुको झुकाव कोण प्राप्त गर्नु हो (जस्तै एक चतुर्कुपाइटर, एक धतुरापिंग कार) x, पिच कोण, रोल कोण, कोण कोण, कोण कोण।हामी mpu-60500 को छ डाटा पढ्छौं (तीन-अक्ष त्वती ट्रायल विज्ञापन मान) I2C ईन्टरफेस मार्फत।आसन फ्रेभ प्रोसेसिंग प्रशोधन, पिच, रोल, र यावाल कोण गणना गर्न सकिन्छ।मापन मानहरूको लागि निर्देशल सन्दर्भको रूपमा तलको आंकडामा देखाइएको छ, जसले दायाँ-हात निर्देशित प्रणालीको सिद्धान्त अनुसरण गर्दछ (त्यो हो, X- को सकारात्मक दिशामा चलिरहेको छ।अक्ष, अनुक्रमणिका औंलाले y अक्षको सकारात्मक दिशालाई औंल्याउँछ, र मध्य औंलाले Z-Axis को सकारात्मक दिशालाई औंल्याउँछ। दिशा)।
सूची
यसको समर्पित I2C सेन्सर बस, MPU-60 50 50 50 50500 ले सिधा बाह्य - अक्ष कम्पासबाट इनपुट प्राप्त गर्न सक्षम छ - पूर्ण - अक्ष क्रान्ति प्रदान गर्दछ।यसले संयुक्त जिरोस्कोप र एक्सेलेटर टाइमलाइन बीचको भिन्नतालाई हटाउँछ र बहु-कम्पोनेन्ट समाधानहरूको तुलनामा प्याकेजि printe ठाउँ कम गर्दछ।जब एक तीन-अक्ष MapismounounounTe मा जडान गरिएको, MPU-60x0x0 पूर्ण I2-अक्ष टेक फ्यूजन आउटपुट गर्न सक्षम छ - अक्ष टॉप फ्रेम आउटपुट (नोट गर्नुहोस् कि MPU-6000 मा मात्र उपलब्ध छ।
विकल्पहरू र समकक्षहरू
- MPU-3300
- MPU-6000
- MPU-6500
MPU-60500 को निर्माता
MPU-60500 को निर्माता TDK हो।TDK को दुई संस्थापक पछि, डा। यो रूपासकी र लिसी लिईले टोकियोमा एटर्रालाई आविष्कार गरे, उनीहरूले टोकियो डिन्क्सिकुगाकुकगाका Kogyo K.K को स्थापना गरे।1 35 .35 मा। विश्वव्यापी इलेक्ट्रोनिक्स उद्योग ब्रान्डको रूपमा, TDK ले सँधै इलेक्ट्रोनिक कच्चा माल र इलेक्ट्रोनिक कम्पोनेन्टहरूको क्षेत्रहरूमा प्रबल पद कायम राखेको छ।TDK को व्यापक र नवीनता-चालित उत्पाद पोर्टफोलियोले सिडमिक निवारणहरू, एमिनेटम इलेक्ट्रोटर कम्पनीहरू, पाईजोटिकीय उत्पादनहरू, पाईजोटिकीहरू र सेन्सर प्रणालीहरू (जस्तै तापमान र दबाव) को रूपमा सेन्सर क्यारेक्टेक्शनहरू, पाईजचुम्बकीय र मेमोन्स सेन्सर), आदि थप, TDK पनि शक्ति आपूर्ति र ऊर्जा उपकरण, चुरोटिक हेड र अन्य उत्पादनहरू पनि प्रदान गर्दछ।यसको उत्पाद ब्रान्डमा TDK, EPCOS, ईन्कोन्स, बाध्य, ट्याटोनिस, ट्रोनिक्स र TDK-LEMBDA समावेश गर्दछ।
आन्तरिक ब्लक MPU-60 50 500500 को आन्तरिक

ती मध्ये scl र SDA MUC मा जोडिएको आईआईसी इन्टरफेसहरू हुन्, र MIC ले आईआईडी इन्टरफेस मार्फत MPU-50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50 50000 लाई नियन्त्रण गर्दछ।त्यहाँ एक इिकन इन्टरफेस, अर्थात् Auce_cl र Ach_da पनि छ।यो ईन्टरफेस बाह्य सेन्सर जस्ता बाह्य दास उपकरणहरू जडान गर्न प्रयोग गर्न सकिन्छ, नौ अक्ष सेन्सर गठन गर्न।दु: ख पोर्ट भोल्टेज हो।यो पिनले न्यूनतम 1.8v लाई समर्थन गर्न सक्छ।हामी सामान्यतया यसलाई सिधा vd मा जडान गर्दछौं।AD1 ले दायर कन्टेड पिन हो जुन दास इन्टरफेस (MCU मा जडित)।यस पिनले इिक ठेगानाको सब भन्दा कम बिटलाई नियन्त्रण गर्दछ।यदि यो Gdd मा जोडिएको छ, MPU-60 50 50 600 को इिकेड ठेगाना 0x68 छ;यदि यो VDD मा जडित छ भने, यो 0x69 हो।कृपया नोट गर्नुहोस् कि यहाँ ठेगानाले डाटा प्रसारणको न्यूनतम बिट समावेश गर्दैन (सब भन्दा कम बिट पढ्नुहोस् पढ्नुहोस् र लेख्ने कार्यहरू प्रतिनिधित्व गर्न प्रयोग गरिन्छ)।MWBWELDDSTC15 मा, AD0 Gdd मा जडान गरिएको छ, त्यसैले MPU-60 60 50 50 50 680 को इिक ठेगाना 0x68 (सबैभन्दा कम बिट बाहेक) हो।
IIC ईन्टरफेस सुरू गर्नुहोस्
MPU-60 50 50500 को लागी SCC15 को साथ कुराकानी गर्न को लागी IIC लाई MPU-50 50 50 50 50 50 50 50 50 50 50 50 50 50।
MPU-60 50 50 500 रिसेट गर्नुहोस्
यस चरणले एमपीए -0 50 500500 मा सबै रेजिष्टरहरूमा उनीहरूको पूर्वनिर्धारित मान भित्रका अन्य रेजिष्टरहरू पुनर्स्थापना गर्दछ, जुन पावर व्यवस्थापन रेजिष्टर रेजिस्टर 1 (0x6b)रिसेट पछि, शक्ति प्रबन्धन मगर नम्बर पूर्वनिर्धारित मान (0x40) लाई पुन: भण्डारण गरिनेछ, र यस रेजिष्टर पछि 0x00 मा सेट गर्नुहोस्।
कोणीय वेग सेन्सेम्बर (जिरो) र त्वरण सेन्सर को पूर्ण-स्केल दायरा सेट गर्नुहोस्
यस चरणमा, हामी Goosccops कन्फिगरेसन रेजिरिफिक्शन रेजिजिनिसियर (0x1b) को माध्यमबाट दुई सेन्सरहरूको पूर्ण-स्केल दायरा (Fsr) सेट गर्छौं र त्वती कन्फिगर कन्फिगरेसन रेजिष्टर (0x1C)।सामान्यतया, हामी Goosccups को पूर्ण-स्केल दायरा सेट अप 2000dps र पूर्ण-स्केलर दायरा मा ± 2 जी
अन्य प्यारामिटरहरू सेट गर्नुहोस्
यहाँ, हामीले निम्न प्यारामिटरहरू कन्फिगर गर्न पनि आवश्यक पर्दछ: Auchress Rexts बन्द गर्नुहोस्, shox I2C ईन्टरफेस अक्षम गर्नुहोस्, GISTCOUPE नमूना फिल्टर सेट गर्नुहोस्, र डिजिटल कम-पास फिल्टर सेट गर्नुहोस् (DLPF)।किनकि हामी यस अध्यायमा डाटा पढ्न अवरोधहरू प्रयोग गर्दैनौं, अवरोध कार्य बन्द गर्नु आवश्यक छ।उही समयमा, हामी अन्य बाह्य सेन्सर जडान गर्न Aux I2C ईन्टरफेस प्रयोग गरिरहेका छैनौं, हामीले यो इन्टरफेस बन्द गर्न पनि आवश्यक छ।यी कार्यहरू अवरोधहरू सक्षम रजिस्टर (0x388) र प्रयोगकर्ता नियन्त्रण रेजिष्टर (0x6A) मार्फत नियन्त्रण गर्न सकिन्छ।MPU-60500 सेन्सर डेटा भण्डार गर्न फिश प्रयोग गर्न सक्दछ, तर हामीले यस अध्यायमा यसको प्रयोग गरेका छैनौं त्यसैले सबै फिनहरू च्यानलहरू बन्द गर्नुपर्दैन।यो fifo को माध्यम बाट नियन्त्रण गर्न सकिन्छ रेजिस्टर (0x23)।पूर्वनिर्धारित द्वारा, यस रेजिष्टर को मान 0 (त्यो हो, फिफा अक्षम छ), त्यसैले हामी पूर्वनिर्धारित मानलाई सीधा प्रयोग गर्न सक्दछौं।Goosccope को नमूना दर नमूना दर डिभाइडर दर्ता (0x19) द्वारा नियन्त्रण गरिन्छ।सामान्यतया, हामी यो नमूना दर 500 मा सेट गर्दछौं। डिजिटल कम-पास फिल्टर (DLPF) को कन्फिगरेसन कन्फिगरेसन रेजिष्टर (0x1A) मार्फत पूरा भयो।सामान्यतया भन्ने हो भने, हामी डाटा सटीकता र प्रतिक्रिया गतिलाई सन्तुलनमार्फत आधा ब्यान्डविथ सेट गर्नेछौं।
प्रणाली घडी स्रोत कन्फिगर गर्नुहोस् र कोणीय वेग सेन्सेम्बर सेन्सर र त्वरण सेन्सर सक्षम गर्नुहोस्
प्रणाली घडी स्रोतको सेटिंग पावर व्यवस्थापन रेजिस्टर 1 (0x6B) मा निर्भर गर्दछ, जहाँ यस रेजिस्टरले यस घडीको स्रोत को चयन निर्धारण गर्दछ।पूर्वनिर्धारित रूपमा, यी तीन बिट्स 0 मा सेट गरिएको छ, जसको मतलब प्रणालीले आन्तरिक 8mhz RC ओएससीओलेर्लेटरलाई घडी स्रोतको रूपमा प्रयोग गर्दछ।यद्यपि, घडी शुद्धता सुधार गर्न, हामी प्रायः यसलाई 1 मा सेट गर्दछौं र X-AXIS CORSCOUCOOP PRSCOUP PLOLE चयन गर्नुहोस्।थप रूपमा, कोणीय वेग सेन्सर र त्वरण सेन्सर सक्षम पार्नु प्रारम्भिक भनाइको एक महत्त्वपूर्ण चरण हो।दुबै अपरेसनहरू पावरले व्यवस्थापन रेजिष्टर रजिस्टर 2 (0x6C) मार्फत कार्यान्वयन हुन्छन्।केवल सम्बन्धित सेन्सर सक्रिय गर्न 0 मासँग सम्बन्धित बिट सेट गर्नुहोस्।माथिको चरणहरू पूरा गरेपछि MPU-60 50 50500 सामान्य काम गर्ने स्थितिमा प्रवेश गर्न सक्दछ।ती रेजिस्टरहरू जुन विशेष रूपमा सेट गरिएका छैनन् प्रणालीले प्रणालीबाट प्रिसेट्सले पूर्वनिर्धारित मान अपनाउनु गर्दछ।
MPU-60 60 50000 काम कसरी हुन्छ?
Gyrry सेन्सर
सेन्सर भित्र जग्गासँग सुसज्जित छ, जो जहिले पनि Gyroscopic प्रभावको कारण प्रारम्भिक दिशातर्फ समानान्तर रहनेछ।तसर्थ, हामी प्रारम्भिक दिशाबाट जम्मत दिशाबाट पत्ता लगाएर घुमाइ र घुमावको कोणको गणना गर्न सक्छौं।
एक्स्टरमामोटर सेन्सर
एक एक्टाइमोमिटर सेन्सर एक उपकरण हो जुन त्वरण मापन गर्न सक्दछ र यो पाईजोइलेक्ट्रिक प्रभावको आधारमा काम गर्दछ।गतिको बन्धनमा, सेन्सरले निपुण शक्तिलाई जन ब्लसमा लागू गर्दछ र त्यसपछि न्यूल्टनको दोस्रो कानून प्रयोग गरेर त्वरण मूल्य गणना गर्दछ।
डिजिटल मोशन प्रोसेसर (DMP)
DUPS MPU60500 चिप मा एक डाटा प्रशोधन मोड्युल हो जुन Gyroscope र experromometermomnommom सेन्सरबाट डाटा प्राप्त गर्न र आउटपुट क्वाइनरियनहरूको प्रशोधन गर्नको लागि एक निर्मित कलोम्यान फिल्टरिंग एल्गोरिथ्म हो।यो सुविधाले परिधीय रूपरेखा औषधीको वर्कलोडलाई ठूलो बनाउँदछ र teryerment फिल्टर र डेटा फ्यूजन प्रक्रियालाई वेवास्ता गर्दछ।
नोटहरू:
Quauntions: quahations साधारण सुपरक्राइम संख्या हो।जटिल संख्याहरू वास्तविक संख्याहरू र काल्पनिक एकाईमा मिलेर बनेको छ, जहाँ म ^ 2 = -1।
MPU-60500 को प्रयोग गरिएको छ?
- खेलौना
- ह्यान्डसेट र पोर्टेबल गेमिंग
- गति-आधारित खेल नियुक्तिकर्ताहरू
- ब्लेरफ्री ™ टेक्नोलोजी (भिडियो / अझै छवि स्थिर)
- Airient ™ टेक्नोलोजी (सुरक्षा / प्रमाणीकरणको लागि)
- तुच्छ ™ ™ IG ™ इशारा मान्यता
- स्वास्थ्य, फिटनेस र खेलकुदको लागि हामीले कमजोर सेन्सरहरू
- प्रेस सक्षम गरिएको खेल र अनुप्रयोग फ्रेमवर्क
- गतिमान्ज ™ टेक्नोलोन्ड (इशारा छोटो कटौतीका लागि)
- स्थान आधारित सेवाहरू, चासोको बिन्दुहरू, र मृत गणना
- इन्टरनेट जडान गर्न dtvs को लागि 3D रिमोट कन्ट्रोलहरू र शीर्ष बक्सहरू, थ्रीडी चूहों
- टचचेनिया ™ टेक्नोलोजी ("स्पर्श" UI आवेदन नियन्त्रण / नेभिगेसन)
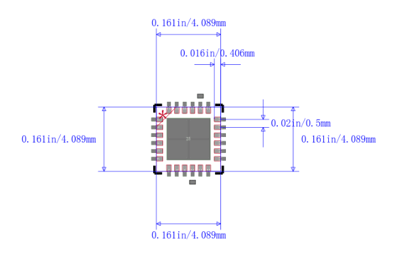
MPU-60 500 को प्याकेज
MPU-60 500500 को आवाज कम गर्ने?
हामी MPU-60 500500 को आवाज कम गर्न निम्न तरिकाहरू लिन सक्दछौं।
क्यालिब्रेटेड सेन्सरहरू प्रयोग गर्नुहोस्
एपीपीआईएस -100 को एक्स्पोस्कोप र मुश्ताकको GISSCCOOP क्यालिभ्याकले आफैंमा सेन्सरहरू र त्रुटि हटाउन सक्दछ, जसले आवाजको प्रभावलाई कम गर्दछ।क्यालिब्रेसन प्रक्रिया सामान्यतया दुई चरणहरू समावेश गर्दछ: स्थिर क्यालिब्रेसन र गति क्यालिब्रेसन।
हार्डवेयर फिल्टर फिल्टर प्रक्रिया
MPU-60500 को पावर लाइनमा फिल्टर क्यापिटर्स थप्दै सेन्सरमा पावर आपूर्ति आवाजको प्रभाव कम गर्न सक्दछ।यसैबीच, PCB लेआउटको बखत, हामीले MPU-60500 टाढा हस्तक्षेपको सम्भावित स्रोतहरूबाट टाढा राख्न प्रयास गर्नुपर्दछ, जस्तै उच्च-फ्रिक्वेन्सी संकेत लाइनहरू र उच्च-पावर कम्पोनेन्टहरू।
सफ्टवेयर फिल्टरिंग प्रोसेसिंग
MPU-60 50000 बाट कच्चा डाटा स collecting ्कलन गरिसकेपछि हामी सफ्टवेयर फिल्टर फिल्टर थप्न सक्दछौं जब प्रारम्भिक डेटा प्री-प्रोटेक्ट गरिएको हस्तक्षेप हटाउन।सामान्यतया प्रयोग गरिएको सफ्टवेयर फिल्टर विधिहरूमा मतलब फिल्टरिंग, मध्यम फिल्टर, कलम्यान फिल्टरिंग र मा।
आन्तरिक कम-पास फिल्टर प्रयोग गर्नुहोस्
MPU-60500 एक आन्तरिक एकीकृत डिजिटल कम कम-पास फिल्टर, जुन यसको कटऑफ फ्रिक्वेन्सी सेट गरेर उच्च-फ्रिक्वेन्सी आवाज कम गर्न प्रयोग गर्न सकिन्छ।विशेष रूपमा, हामी mpu-50 50 50000 को कन्फिगीन्सी आवाज हटाउनका लागि डिजिटल फिल्टरको कटऑफ फ्रिक्वेन्सी सेट गर्न सक्दछौं।
MPU-60500 आधारित गति ट्र्याप्रदार गणना
MPU-60 50500 एक छ-Axis एक्सेस्मिरमिलामीमिटर र गाविस्कोप सेन्सर हो जुन गति र वस्तुहरूको दृष्टिकोण मापन गर्न प्रयोग गर्न सकिन्छ।MPU-60500 मा आधारित गति ट्रेसरी गणना निम्न चरणहरू द्वारा साकार गर्न सकिन्छ:
पहिलो चरण भनेको सेन्सर डाटा पढ्नु हो।हामीले mpu-60500 सेन्सरबाट xpu-60500 सेन्सरबाट xpu-60500 सेन्सरबाट पुन: grosscope डाटा पढ्नु पर्छ।यी डाटाहरू प्राय: डिजिटल ढाँचामा आउटपुट हुन्छन्, त्यसैले केही रूपान्तरण र क्यालिब्रेसन कार्यले उनीहरूलाई वास्तविक मापनहरूमा रूपान्तरण गर्न आवश्यक छ।
दोस्रो चरण भनेको त्वरण गणना गर्नु हो।सर्वप्रथम, हामीले प्रत्येक अक्षमा वस्तुको गति प्राप्त गर्न Experrometer बाट डाटा प्रक्रिया गर्न आवश्यक छ।त्यस पछि, प्रत्येक अक्षमा वस्तुको वेग र विस्थापन गणना गर्न हामीले त्वरण डाटा एकीकृत गर्नु आवश्यक छ।संख्यात्मक एकीकरण प्रविधिहरू, जस्तै EULLE को विधि वा Kutttta-कच्चा विधि, विस्थापन गणना को शुद्धता सुनिश्चित गर्न को लागी प्राय: यस प्रक्रिया मा प्रयोग गरीन्छ।
तेस्रो चरण भनेको प्रेरणाको वेगको गणना गर्नु हो।Gooscope डाटा प्रयोग गर्दै, प्रत्येक अक्ष मा वस्तु को कोणीय वेग को गणना गर्न सकिन्छ।फेरि, यो डाटा क्यालिब्रेट गर्न आवश्यक छ र वास्तविक शारीरिक इकाईहरूमा कोणनीतिक वेग प्राप्त गर्न रूपान्तरण गर्नु आवश्यक छ।
चौथो चरण रोटेशन गणना गर्नु हो।कोणीय वेग डाटा एकीकृत गरेर, प्रत्येक अक्षको वस्तुको घुमाउने कोण गणना गर्न सकिन्छ।यो संख्यात्मक एकीकरण प्रविधिहरू प्रयोग गर्न सकिन्छ जस्तै युगको विधि वा लंज-कट्टा विधि कोण गणना गर्न।
पाँचौं चरण डाटा मर्ज गर्नु हो।हामी Exproomerts र Wangercopes को पूर्ण दृष्टिकोण र स्थिति को स्थिति जानकारी प्राप्त गर्न को लागी डाटा संयोजन गर्दछौं।यो एल्गोरिथ्म प्रयोग गर्न सकिन्छ जस्तै Qualnience-आधारित मनोवृत्ति सोलभर वा Eulle कोण सोल्डर।
छैठौं चरण परिणाम कल्पना गर्नु हो।हामी कम्पाइल गरिएको वस्तु गतिशीलता प्रक्षेयंधरलाई 3D समन्वय प्रणालीमा बिन्दुहरूको सेटमा रूपान्तरण गर्दछौं र यसले वस्तुको गतिशीलता र मनोवृत्ति परिवर्तनको अधिक सहज ज्ञानको लागि उपयुक्त दृश्य उपकरणहरू प्रयोग गर्दछ।
बारम्बार सोधिने प्रश्नहरू [FAQ]
1. MPU60500500 कसरी सहि छ?
अधिग्रहित परिणामहरूले 1% र विश्वसनीयता भन्दा कम सटीकता देखायो र लिफ्ट शाफ्ट र लिफ्ट उद्योगको उच्च आयाम प्रदान गर्दछ।
2. MPU60500 बाट कसरी डाटा पढ्ने?
आन्तरिक एमपीउ 600000000 रेजिष्टरहरू पठाउन, मास्टरले एक सुरू सर्त पठाउँदछ, i2c दास ठेगाना र एक लेख्ने ठेगाना जुन पढिरहेको छ।
A. MPU6050 प्रयोग गरिएको छ?
कमजोर स्वास्थ्य-ट्र्याकिंगमा, फिटनेस-ट्र्याकिंग उपकरणहरू।ड्रन र क्वाडकापन्टहरूमा, MPU6050 स्थिति नियन्त्रणको लागि प्रयोग गरिन्छ।रोबोट बाहु नियन्त्रणमा प्रयोग गरियो।ह्यान्ड इशारा नियन्त्रण उपकरणहरू।
A. MPU60 AM AMU हो?
MPU605050 इम्वा सेन्सर ब्लकले MPU-50500 सेन्सरबाट डाटा पढ्छ जुन हार्डवेयरमा जोडिएको छ।ब्लक भ्रमण आउटपुट, कोणीय दर, र सेन्सरको अक्षमा तापमान आउटपुट गर्दछ।
M. MPU60500 को प्रसंस्करण के हो?
यो MPU6050 को बोर्डबो प्रोसेसर हो जसले डिप्रेरीमीटर र Goosccope बाट आउँदै गरेको डाटा संयोजन गर्दछ।DPP MPU6050500 को प्रयोग गर्न कुञ्जी हो र पछि विस्तृत रूपमा वर्णन गरिएको छ।सबै माइक्रोप्रोसेर्सहरूको जस्तै duf लाई चल्तीमा बढ्नको लागि।
कार्य परीक्षण।उच्चतम लागत प्रभावी उत्पादनहरू र उत्तम सेवा हाम्रो अनन्त प्रतिबद्धता हो।
तातो लेख
- Cr20322 र CR2016 सार विसंगत हो
- मस्फोनेट: परिभाषा, कार्य सिद्धान्त र चयन
- रिले स्थापना र परीक्षण, रिले वाइरिंग रेखाचित्रको व्याख्या
- Cr2016 बनाम cr2032 के फरक छ
- नेकपा VS PSP: के फरक छ?
- ESP322 VS STM32: कुन माइक्रोन्टोन्ट्रोलर तपाईको लागि राम्रो छ?
- LM358 दोहोरो अपरेशनल एम्प्रिफायर विस्तृत गाइड: पिनआउट्स, सर्किट डाँडहरू, समान उपयोगीहरू, उपयोगी उदाहरणहरू
- CR2032 vs dl2032 vs cl2025 तुलना गर्नुहोस्
- मतभेद isp32 र esp32-S3 प्राविधिक र प्रदर्शन विश्लेषण
- RC श्रृंखला सर्किटको विस्तृत विश्लेषण
 एनआरएफ 24l011111 संचार चिपको क्षमता र अनुप्रयोगहरू अन्वेषण गर्दै
एनआरएफ 24l011111 संचार चिपको क्षमता र अनुप्रयोगहरू अन्वेषण गर्दै
2024-04-25
 MMBT3904 NPN ट्रान्सरीटर: यसको विशिष्टता, व्यापक अनुप्रयोग मार्गनिर्देशन, र MMT3 90 04 बनाम ms. MMBT5555551
MMBT3904 NPN ट्रान्सरीटर: यसको विशिष्टता, व्यापक अनुप्रयोग मार्गनिर्देशन, र MMT3 90 04 बनाम ms. MMBT5555551
2024-04-25
तातो भाग नम्बर
 C3216C0G2J332K160AA
C3216C0G2J332K160AA CGA8R4C0G2J473J320KA
CGA8R4C0G2J473J320KA CL31C270JBCNNNC
CL31C270JBCNNNC 06033C472KAT4A
06033C472KAT4A 12107A471KAT2A
12107A471KAT2A 18123A473KAT2A
18123A473KAT2A GRM43ER60J476ME01L
GRM43ER60J476ME01L GRM0335C1E390JD01D
GRM0335C1E390JD01D- GCM0335C1E820JD03D
 F931A157MCC
F931A157MCC
- GRM1535C1H180JDD5D
- PI49FCT20807HE
- CY8C4246LTI-M445
- MB9BF416NPMC-G-JNE2
- LC5512MV-75F256C
- USB2514B-AEZC-TR
- SP3222EBCY-L
- QT1101-IS48G
- BQ24765RUVT
- ADR440BRZ
- AD5331BRUZ-REEL
- TPS2812PWRG4
- MSP430G2303IPW28R
- AD8495ARMZ-R7
- LT1619EMS8#TRPBF
- AD9051BRSZ
- TMS320C44PDB60
- XC2C384-10FTG256C
- LTC3727EUH-1#TRPBF
- AM188ESLV-20KC
- BC41B143A05U
- BCM68380IFSBG
- CXB1443AR
- M29DW323DB70ZE6
- MT48LC16M8A2P-75
- PTWL6040A1ZQZR
- TD62503P
- HI3531ARBCV100
- ATP867-B
- HD74LVC373AT
- K8D6316UBM-DI07
- M2553-01
- QCPM-8881-TR1
- LTC4412CMS8#TRPBF
- HM1-6561/883
- KS6M5U3679CBP
- BCM5892PC0KFBG
- BZT52-B22-R1-00001
- 852-1417